Weilin Ma's Portfolio
Portfolio
About
Contact
Portfolio
ROS (Robot Operating System) Course Project
ROS (Robot Operating System) Course Project
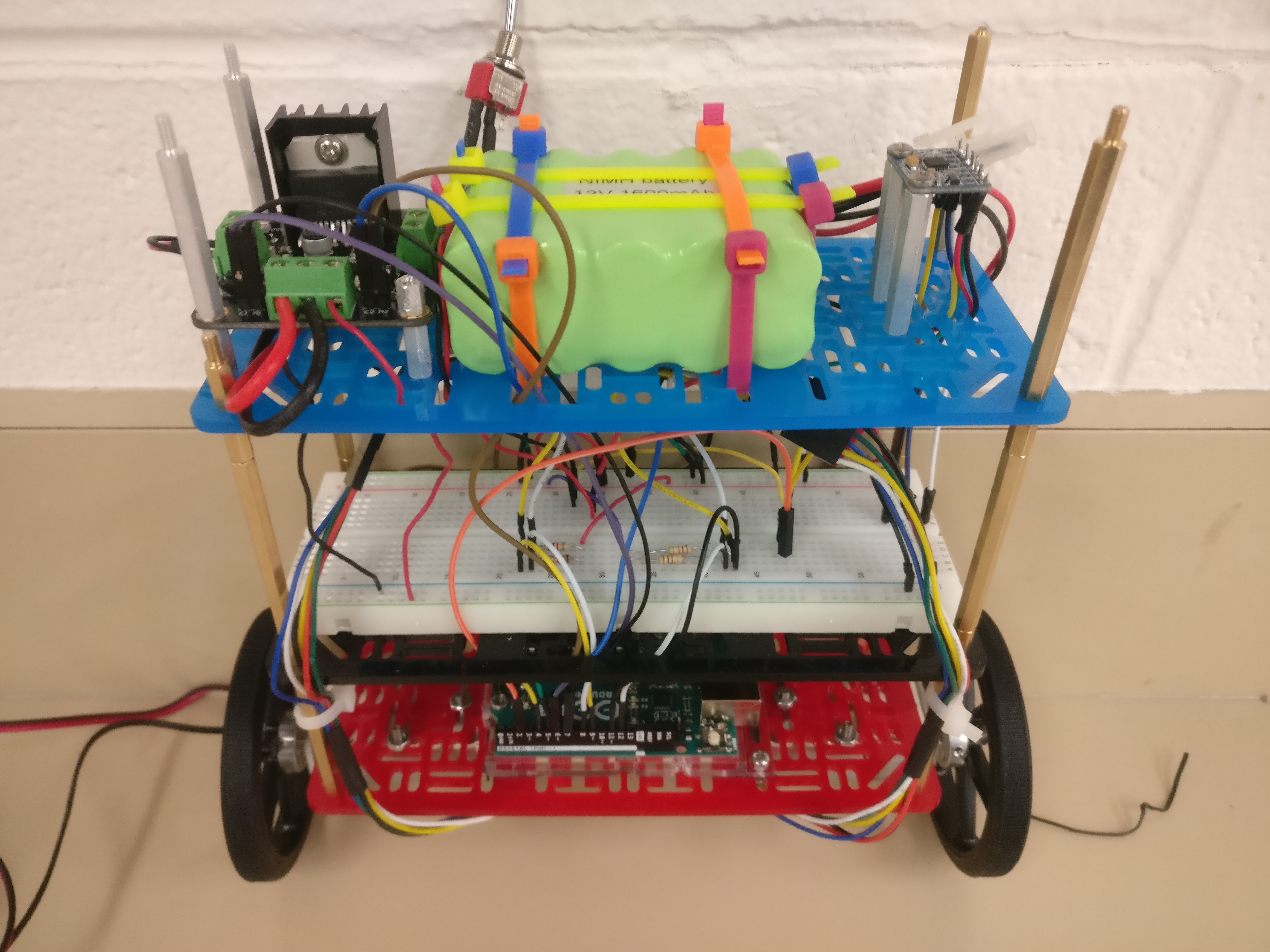
Two-wheel Self-balancing Robot
Smart Rotary Actuator for Robotics Research and Applications
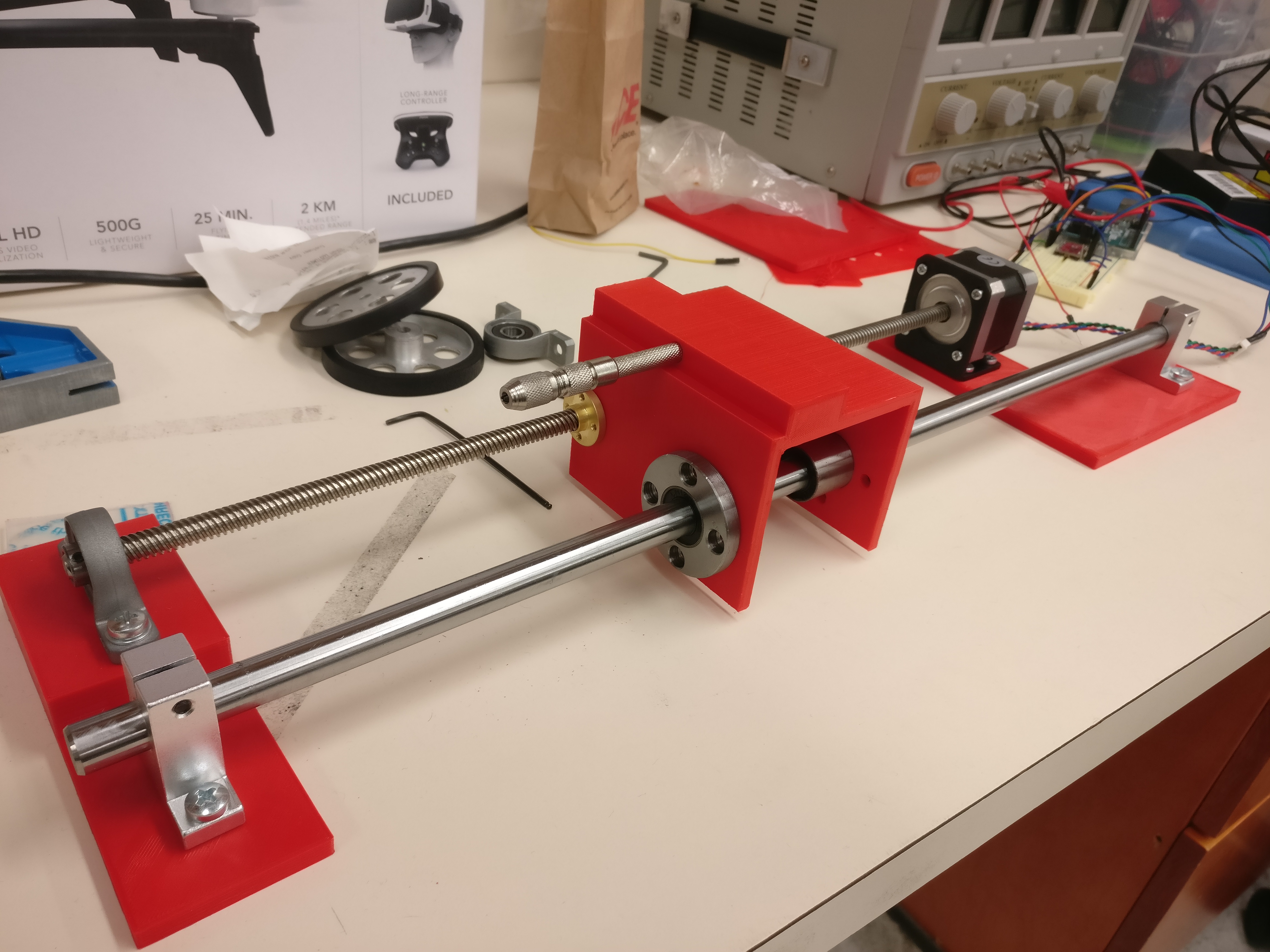
Linear Motion Pulling Machine for Whicker Drawing Research